
Copyright 2023 The TF-Agents Authors.
|
|
|
 在 GitHub 上檢視原始碼 在 GitHub 上檢視原始碼
|
|
簡介
本範例示範如何使用 TF-Agents 程式庫在 Cartpole 環境中訓練 DQN (深度 Q 網路) 代理程式。

它將引導您瞭解強化學習 (RL) 管道中的所有元件,以進行訓練、評估和資料收集。
若要即時執行此程式碼,請按一下上方的「在 Google Colab 中執行」連結。
設定
如果您尚未安裝下列依附元件,請執行
sudo apt-get updatesudo apt-get install -y xvfb ffmpeg freeglut3-devpip install 'imageio==2.4.0'pip install pyvirtualdisplaypip install tf-agents[reverb]pip install pygletpip install tf-keras
import os
# Keep using keras-2 (tf-keras) rather than keras-3 (keras).
os.environ['TF_USE_LEGACY_KERAS'] = '1'
from __future__ import absolute_import, division, print_function
import base64
import imageio
import IPython
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import PIL.Image
import pyvirtualdisplay
import reverb
import tensorflow as tf
from tf_agents.agents.dqn import dqn_agent
from tf_agents.drivers import py_driver
from tf_agents.environments import suite_gym
from tf_agents.environments import tf_py_environment
from tf_agents.eval import metric_utils
from tf_agents.metrics import tf_metrics
from tf_agents.networks import sequential
from tf_agents.policies import py_tf_eager_policy
from tf_agents.policies import random_tf_policy
from tf_agents.replay_buffers import reverb_replay_buffer
from tf_agents.replay_buffers import reverb_utils
from tf_agents.trajectories import trajectory
from tf_agents.specs import tensor_spec
from tf_agents.utils import common
2023-12-22 13:55:18.305379: E external/local_xla/xla/stream_executor/cuda/cuda_dnn.cc:9261] Unable to register cuDNN factory: Attempting to register factory for plugin cuDNN when one has already been registered 2023-12-22 13:55:18.305427: E external/local_xla/xla/stream_executor/cuda/cuda_fft.cc:607] Unable to register cuFFT factory: Attempting to register factory for plugin cuFFT when one has already been registered 2023-12-22 13:55:18.307063: E external/local_xla/xla/stream_executor/cuda/cuda_blas.cc:1515] Unable to register cuBLAS factory: Attempting to register factory for plugin cuBLAS when one has already been registered
# Set up a virtual display for rendering OpenAI gym environments.
display = pyvirtualdisplay.Display(visible=0, size=(1400, 900)).start()
tf.version.VERSION
'2.15.0'
超參數
num_iterations = 20000 # @param {type:"integer"}
initial_collect_steps = 100 # @param {type:"integer"}
collect_steps_per_iteration = 1# @param {type:"integer"}
replay_buffer_max_length = 100000 # @param {type:"integer"}
batch_size = 64 # @param {type:"integer"}
learning_rate = 1e-3 # @param {type:"number"}
log_interval = 200 # @param {type:"integer"}
num_eval_episodes = 10 # @param {type:"integer"}
eval_interval = 1000 # @param {type:"integer"}
環境
在強化學習 (RL) 中,環境代表要解決的任務或問題。標準環境可以使用 tf_agents.environments 套件在 TF-Agents 中建立。TF-Agents 具有從 OpenAI Gym、Atari 和 DM Control 等來源載入環境的套件。
從 OpenAI Gym 套件載入 CartPole 環境。
env_name = 'CartPole-v0'
env = suite_gym.load(env_name)
您可以轉譯此環境以查看其外觀。自由擺動的桿子連接到台車。目標是左右移動台車,以保持桿子指向上方。
env.reset()
PIL.Image.fromarray(env.render())
environment.step 方法會在環境中採取 action,並傳回 TimeStep 元組,其中包含環境的下一個觀察結果和動作的獎勵。
time_step_spec() 方法會傳回 TimeStep 元組的規格。其 observation 屬性會顯示觀察結果的形狀、資料類型和允許值的範圍。reward 屬性會顯示獎勵的相同詳細資料。
print('Observation Spec:')
print(env.time_step_spec().observation)
Observation Spec:
BoundedArraySpec(shape=(4,), dtype=dtype('float32'), name='observation', minimum=[-4.8000002e+00 -3.4028235e+38 -4.1887903e-01 -3.4028235e+38], maximum=[4.8000002e+00 3.4028235e+38 4.1887903e-01 3.4028235e+38])
print('Reward Spec:')
print(env.time_step_spec().reward)
Reward Spec:
ArraySpec(shape=(), dtype=dtype('float32'), name='reward')
action_spec() 方法會傳回有效動作的形狀、資料類型和允許值。
print('Action Spec:')
print(env.action_spec())
Action Spec:
BoundedArraySpec(shape=(), dtype=dtype('int64'), name='action', minimum=0, maximum=1)
在 Cartpole 環境中
observation是 4 個浮點數的陣列- 台車的位置和速度
- 桿子的角位置和角速度
reward是純量浮點數值action是純量整數,只有兩個可能的值0—「向左移動」1—「向右移動」
time_step = env.reset()
print('Time step:')
print(time_step)
action = np.array(1, dtype=np.int32)
next_time_step = env.step(action)
print('Next time step:')
print(next_time_step)
Time step:
TimeStep(
{'step_type': array(0, dtype=int32),
'reward': array(0., dtype=float32),
'discount': array(1., dtype=float32),
'observation': array([ 0.0365577 , -0.00826731, -0.02852953, -0.02371309], dtype=float32)})
Next time step:
TimeStep(
{'step_type': array(1, dtype=int32),
'reward': array(1., dtype=float32),
'discount': array(1., dtype=float32),
'observation': array([ 0.03639235, 0.18725191, -0.02900379, -0.32525912], dtype=float32)})
通常會例項化兩個環境:一個用於訓練,另一個用於評估。
train_py_env = suite_gym.load(env_name)
eval_py_env = suite_gym.load(env_name)
Cartpole 環境與大多數環境一樣,以純 Python 撰寫。這會使用 TFPyEnvironment 包裝函式轉換為 TensorFlow。
原始環境的 API 使用 Numpy 陣列。TFPyEnvironment 會將這些轉換為 Tensors,使其與 Tensorflow 代理程式和策略相容。
train_env = tf_py_environment.TFPyEnvironment(train_py_env)
eval_env = tf_py_environment.TFPyEnvironment(eval_py_env)
代理程式
用於解決 RL 問題的演算法由 Agent 表示。TF-Agents 提供各種 Agents 的標準實作,包括
DQN 代理程式可用於任何具有離散動作空間的環境。
DQN 代理程式的核心是 QNetwork,這是一種神經網路模型,可以學習預測給定環境觀察結果的所有動作的 QValues (預期報酬)。
我們將使用 tf_agents.networks. 來建立 QNetwork。網路將包含一系列 tf.keras.layers.Dense 層,其中最後一層將針對每個可能的動作具有 1 個輸出。
fc_layer_params = (100, 50)
action_tensor_spec = tensor_spec.from_spec(env.action_spec())
num_actions = action_tensor_spec.maximum - action_tensor_spec.minimum + 1
# Define a helper function to create Dense layers configured with the right
# activation and kernel initializer.
def dense_layer(num_units):
return tf.keras.layers.Dense(
num_units,
activation=tf.keras.activations.relu,
kernel_initializer=tf.keras.initializers.VarianceScaling(
scale=2.0, mode='fan_in', distribution='truncated_normal'))
# QNetwork consists of a sequence of Dense layers followed by a dense layer
# with `num_actions` units to generate one q_value per available action as
# its output.
dense_layers = [dense_layer(num_units) for num_units in fc_layer_params]
q_values_layer = tf.keras.layers.Dense(
num_actions,
activation=None,
kernel_initializer=tf.keras.initializers.RandomUniform(
minval=-0.03, maxval=0.03),
bias_initializer=tf.keras.initializers.Constant(-0.2))
q_net = sequential.Sequential(dense_layers + [q_values_layer])
現在使用 tf_agents.agents.dqn.dqn_agent 來例項化 DqnAgent。除了 time_step_spec、action_spec 和 QNetwork 之外,代理程式建構函式還需要最佳化工具 (在此案例中為 AdamOptimizer)、損失函數和整數步驟計數器。
optimizer = tf.keras.optimizers.Adam(learning_rate=learning_rate)
train_step_counter = tf.Variable(0)
agent = dqn_agent.DqnAgent(
train_env.time_step_spec(),
train_env.action_spec(),
q_network=q_net,
optimizer=optimizer,
td_errors_loss_fn=common.element_wise_squared_loss,
train_step_counter=train_step_counter)
agent.initialize()
策略
策略定義代理程式在環境中執行動作的方式。通常,強化學習的目標是訓練基礎模型,直到策略產生所需的結果。
在本教學課程中
- 所需的結果是保持桿子在台車上方直立平衡。
- 策略會針對每個
time_step觀察結果傳回動作 (向左或向右)。
代理程式包含兩個策略
agent.policy— 用於評估和部署的主要策略。agent.collect_policy— 用於資料收集的第二個策略。
eval_policy = agent.policy
collect_policy = agent.collect_policy
策略可以獨立於代理程式建立。例如,使用 tf_agents.policies.random_tf_policy 來建立一個策略,該策略將針對每個 time_step 隨機選取動作。
random_policy = random_tf_policy.RandomTFPolicy(train_env.time_step_spec(),
train_env.action_spec())
若要從策略取得動作,請呼叫 policy.action(time_step) 方法。time_step 包含來自環境的觀察結果。此方法會傳回 PolicyStep,這是一個具名元組,包含三個元件
action— 要採取的動作 (在此案例中為0或1)state— 用於具狀態 (也就是以 RNN 為基礎) 策略info— 輔助資料,例如動作的對數機率
example_environment = tf_py_environment.TFPyEnvironment(
suite_gym.load('CartPole-v0'))
time_step = example_environment.reset()
random_policy.action(time_step)
PolicyStep(action=<tf.Tensor: shape=(1,), dtype=int64, numpy=array([1])>, state=(), info=())
指標與評估
用於評估策略的最常見指標是平均報酬。報酬是在環境中針對一個回合執行策略時獲得的獎勵總和。執行多個回合,建立平均報酬。
下列函式會計算指定策略、環境和回合數的策略平均報酬。
def compute_avg_return(environment, policy, num_episodes=10):
total_return = 0.0
for _ in range(num_episodes):
time_step = environment.reset()
episode_return = 0.0
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = environment.step(action_step.action)
episode_return += time_step.reward
total_return += episode_return
avg_return = total_return / num_episodes
return avg_return.numpy()[0]
# See also the metrics module for standard implementations of different metrics.
# https://github.com/tensorflow/agents/tree/master/tf_agents/metrics
在 random_policy 上執行此計算會顯示環境中的基準效能。
compute_avg_return(eval_env, random_policy, num_eval_episodes)
23.5
重播緩衝區
為了追蹤從環境收集的資料,我們將使用 Reverb,這是 Deepmind 提供的高效率、可擴充且易於使用的重播系統。它會在我們收集軌跡時儲存體驗資料,並在訓練期間使用。
此重播緩衝區是使用規格建構的,這些規格描述要儲存的張量,可以從代理程式使用 agent.collect_data_spec 取得。
table_name = 'uniform_table'
replay_buffer_signature = tensor_spec.from_spec(
agent.collect_data_spec)
replay_buffer_signature = tensor_spec.add_outer_dim(
replay_buffer_signature)
table = reverb.Table(
table_name,
max_size=replay_buffer_max_length,
sampler=reverb.selectors.Uniform(),
remover=reverb.selectors.Fifo(),
rate_limiter=reverb.rate_limiters.MinSize(1),
signature=replay_buffer_signature)
reverb_server = reverb.Server([table])
replay_buffer = reverb_replay_buffer.ReverbReplayBuffer(
agent.collect_data_spec,
table_name=table_name,
sequence_length=2,
local_server=reverb_server)
rb_observer = reverb_utils.ReverbAddTrajectoryObserver(
replay_buffer.py_client,
table_name,
sequence_length=2)
[reverb/cc/platform/tfrecord_checkpointer.cc:162] Initializing TFRecordCheckpointer in /tmpfs/tmp/tmpcvnrrkpg. [reverb/cc/platform/tfrecord_checkpointer.cc:565] Loading latest checkpoint from /tmpfs/tmp/tmpcvnrrkpg [reverb/cc/platform/default/server.cc:71] Started replay server on port 46351
對於大多數代理程式,collect_data_spec 是名為 Trajectory 的具名元組,其中包含觀察結果、動作、獎勵和其他項目的規格。
agent.collect_data_spec
Trajectory(
{'step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type'),
'observation': BoundedTensorSpec(shape=(4,), dtype=tf.float32, name='observation', minimum=array([-4.8000002e+00, -3.4028235e+38, -4.1887903e-01, -3.4028235e+38],
dtype=float32), maximum=array([4.8000002e+00, 3.4028235e+38, 4.1887903e-01, 3.4028235e+38],
dtype=float32)),
'action': BoundedTensorSpec(shape=(), dtype=tf.int64, name='action', minimum=array(0), maximum=array(1)),
'policy_info': (),
'next_step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type'),
'reward': TensorSpec(shape=(), dtype=tf.float32, name='reward'),
'discount': BoundedTensorSpec(shape=(), dtype=tf.float32, name='discount', minimum=array(0., dtype=float32), maximum=array(1., dtype=float32))})
agent.collect_data_spec._fields
('step_type',
'observation',
'action',
'policy_info',
'next_step_type',
'reward',
'discount')
資料收集
現在在環境中執行隨機策略幾個步驟,將資料記錄在重播緩衝區中。
在這裡,我們使用「PyDriver」來執行體驗收集迴圈。您可以在我們的驅動程式教學課程中深入瞭解 TF Agents 驅動程式。
py_driver.PyDriver(
env,
py_tf_eager_policy.PyTFEagerPolicy(
random_policy, use_tf_function=True),
[rb_observer],
max_steps=initial_collect_steps).run(train_py_env.reset())
(TimeStep(
{'step_type': array(1, dtype=int32),
'reward': array(1., dtype=float32),
'discount': array(1., dtype=float32),
'observation': array([-0.03368392, 0.18694404, -0.00172193, -0.24534112], dtype=float32)}),
())
重播緩衝區現在是軌跡的集合。
# For the curious:
# Uncomment to peel one of these off and inspect it.
# iter(replay_buffer.as_dataset()).next()
代理程式需要存取重播緩衝區。這是透過建立可疊代的 tf.data.Dataset 管道來提供的,該管道會將資料饋送至代理程式。
重播緩衝區的每一列只儲存單一觀察步驟。但是由於 DQN 代理程式需要目前和下一個觀察結果才能計算損失,因此資料集管道將為批次中的每個項目取樣兩個相鄰的列 (num_steps=2)。
此資料集也會透過執行平行呼叫和預先擷取資料來最佳化。
# Dataset generates trajectories with shape [Bx2x...]
dataset = replay_buffer.as_dataset(
num_parallel_calls=3,
sample_batch_size=batch_size,
num_steps=2).prefetch(3)
dataset
<_PrefetchDataset element_spec=(Trajectory(
{'step_type': TensorSpec(shape=(64, 2), dtype=tf.int32, name=None),
'observation': TensorSpec(shape=(64, 2, 4), dtype=tf.float32, name=None),
'action': TensorSpec(shape=(64, 2), dtype=tf.int64, name=None),
'policy_info': (),
'next_step_type': TensorSpec(shape=(64, 2), dtype=tf.int32, name=None),
'reward': TensorSpec(shape=(64, 2), dtype=tf.float32, name=None),
'discount': TensorSpec(shape=(64, 2), dtype=tf.float32, name=None)}), SampleInfo(key=TensorSpec(shape=(64, 2), dtype=tf.uint64, name=None), probability=TensorSpec(shape=(64, 2), dtype=tf.float64, name=None), table_size=TensorSpec(shape=(64, 2), dtype=tf.int64, name=None), priority=TensorSpec(shape=(64, 2), dtype=tf.float64, name=None), times_sampled=TensorSpec(shape=(64, 2), dtype=tf.int32, name=None)))>
iterator = iter(dataset)
print(iterator)
<tensorflow.python.data.ops.iterator_ops.OwnedIterator object at 0x7f048a8c8dc0>
# For the curious:
# Uncomment to see what the dataset iterator is feeding to the agent.
# Compare this representation of replay data
# to the collection of individual trajectories shown earlier.
# iterator.next()
訓練代理程式
在訓練迴圈期間必須發生兩件事
- 從環境收集資料
- 使用該資料來訓練代理程式的神經網路
此範例也會定期評估策略並列印目前分數。
以下執行時間約 5 分鐘。
try:
%%time
except:
pass
# (Optional) Optimize by wrapping some of the code in a graph using TF function.
agent.train = common.function(agent.train)
# Reset the train step.
agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
returns = [avg_return]
# Reset the environment.
time_step = train_py_env.reset()
# Create a driver to collect experience.
collect_driver = py_driver.PyDriver(
env,
py_tf_eager_policy.PyTFEagerPolicy(
agent.collect_policy, use_tf_function=True),
[rb_observer],
max_steps=collect_steps_per_iteration)
for _ in range(num_iterations):
# Collect a few steps and save to the replay buffer.
time_step, _ = collect_driver.run(time_step)
# Sample a batch of data from the buffer and update the agent's network.
experience, unused_info = next(iterator)
train_loss = agent.train(experience).loss
step = agent.train_step_counter.numpy()
if step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, train_loss))
if step % eval_interval == 0:
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
print('step = {0}: Average Return = {1}'.format(step, avg_return))
returns.append(avg_return)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.9/site-packages/tensorflow/python/util/dispatch.py:1260: calling foldr_v2 (from tensorflow.python.ops.functional_ops) with back_prop=False is deprecated and will be removed in a future version. Instructions for updating: back_prop=False is deprecated. Consider using tf.stop_gradient instead. Instead of: results = tf.foldr(fn, elems, back_prop=False) Use: results = tf.nest.map_structure(tf.stop_gradient, tf.foldr(fn, elems)) [reverb/cc/client.cc:165] Sampler and server are owned by the same process (42980) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:165] Sampler and server are owned by the same process (42980) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:165] Sampler and server are owned by the same process (42980) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:165] Sampler and server are owned by the same process (42980) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:165] Sampler and server are owned by the same process (42980) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:165] Sampler and server are owned by the same process (42980) so Table uniform_table is accessed directly without gRPC. WARNING: All log messages before absl::InitializeLog() is called are written to STDERR I0000 00:00:1703253329.256450 44311 device_compiler.h:186] Compiled cluster using XLA! This line is logged at most once for the lifetime of the process. step = 200: loss = 168.9337615966797 step = 400: loss = 2.769679069519043 step = 600: loss = 20.378292083740234 step = 800: loss = 2.9951205253601074 step = 1000: loss = 3.985201358795166 step = 1000: Average Return = 41.5 step = 1200: loss = 27.128450393676758 step = 1400: loss = 5.9545087814331055 step = 1600: loss = 30.321374893188477 step = 1800: loss = 4.8639116287231445 step = 2000: loss = 77.69764709472656 step = 2000: Average Return = 189.3000030517578 step = 2200: loss = 38.41033935546875 step = 2400: loss = 73.83688354492188 step = 2600: loss = 89.96795654296875 step = 2800: loss = 318.172119140625 step = 3000: loss = 119.87837219238281 step = 3000: Average Return = 183.1999969482422 step = 3200: loss = 348.0591125488281 step = 3400: loss = 306.32928466796875 step = 3600: loss = 2720.41943359375 step = 3800: loss = 1241.906982421875 step = 4000: loss = 259.3073425292969 step = 4000: Average Return = 177.60000610351562 step = 4200: loss = 411.57086181640625 step = 4400: loss = 96.17520141601562 step = 4600: loss = 293.4364318847656 step = 4800: loss = 115.97804260253906 step = 5000: loss = 135.9969482421875 step = 5000: Average Return = 184.10000610351562 step = 5200: loss = 108.25897216796875 step = 5400: loss = 117.57241821289062 step = 5600: loss = 203.2187957763672 step = 5800: loss = 107.27171325683594 step = 6000: loss = 89.8726806640625 step = 6000: Average Return = 196.5 step = 6200: loss = 719.5379638671875 step = 6400: loss = 671.7078247070312 step = 6600: loss = 605.4098510742188 step = 6800: loss = 118.79557800292969 step = 7000: loss = 1082.111572265625 step = 7000: Average Return = 200.0 step = 7200: loss = 377.11651611328125 step = 7400: loss = 135.56011962890625 step = 7600: loss = 155.7529296875 step = 7800: loss = 162.6855926513672 step = 8000: loss = 160.82798767089844 step = 8000: Average Return = 200.0 step = 8200: loss = 162.89614868164062 step = 8400: loss = 167.7406005859375 step = 8600: loss = 108.040771484375 step = 8800: loss = 545.4006958007812 step = 9000: loss = 176.59364318847656 step = 9000: Average Return = 200.0 step = 9200: loss = 808.9935913085938 step = 9400: loss = 179.5496063232422 step = 9600: loss = 115.72040557861328 step = 9800: loss = 110.83393096923828 step = 10000: loss = 1168.90380859375 step = 10000: Average Return = 200.0 step = 10200: loss = 387.125244140625 step = 10400: loss = 3282.5703125 step = 10600: loss = 4486.83642578125 step = 10800: loss = 5873.224609375 step = 11000: loss = 4588.74462890625 step = 11000: Average Return = 200.0 step = 11200: loss = 233958.21875 step = 11400: loss = 3961.323486328125 step = 11600: loss = 9469.7607421875 step = 11800: loss = 79834.6953125 step = 12000: loss = 6522.5 step = 12000: Average Return = 200.0 step = 12200: loss = 4317.1884765625 step = 12400: loss = 187011.5625 step = 12600: loss = 2300.244873046875 step = 12800: loss = 2199.23193359375 step = 13000: loss = 4176.35888671875 step = 13000: Average Return = 154.10000610351562 step = 13200: loss = 3100.556640625 step = 13400: loss = 114706.8125 step = 13600: loss = 1447.1259765625 step = 13800: loss = 11129.3818359375 step = 14000: loss = 1454.640380859375 step = 14000: Average Return = 200.0 step = 14200: loss = 1165.739990234375 step = 14400: loss = 1011.5919189453125 step = 14600: loss = 1090.4755859375 step = 14800: loss = 1562.9677734375 step = 15000: loss = 1205.5361328125 step = 15000: Average Return = 200.0 step = 15200: loss = 913.7637939453125 step = 15400: loss = 8834.7216796875 step = 15600: loss = 318027.15625 step = 15800: loss = 5136.9150390625 step = 16000: loss = 374743.65625 step = 16000: Average Return = 200.0 step = 16200: loss = 4737.19287109375 step = 16400: loss = 5279.40478515625 step = 16600: loss = 4674.5009765625 step = 16800: loss = 3743.15087890625 step = 17000: loss = 15105.62109375 step = 17000: Average Return = 200.0 step = 17200: loss = 938550.0 step = 17400: loss = 9318.6015625 step = 17600: loss = 10585.978515625 step = 17800: loss = 8195.138671875 step = 18000: loss = 288772.40625 step = 18000: Average Return = 200.0 step = 18200: loss = 6771.6826171875 step = 18400: loss = 3363.34326171875 step = 18600: loss = 611807.75 step = 18800: loss = 6124.15966796875 step = 19000: loss = 1373558.5 step = 19000: Average Return = 200.0 step = 19200: loss = 764662.625 step = 19400: loss = 342950.84375 step = 19600: loss = 10324.072265625 step = 19800: loss = 13140.9892578125 step = 20000: loss = 55873.1328125 step = 20000: Average Return = 200.0
視覺化
繪圖
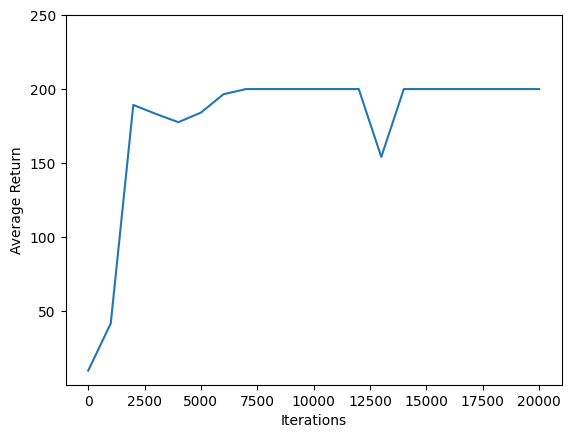
使用 matplotlib.pyplot 來繪製策略在訓練期間的改善情況。
Cartpole-v0 的一個反覆運算包含 200 個時間步驟。環境會針對桿子保持豎立的每個步驟給予 +1 的獎勵,因此一個回合的最大報酬為 200。圖表顯示報酬在訓練期間每次評估時都會朝該最大值增加。(它可能有點不穩定,而且每次不一定單調遞增。)
iterations = range(0, num_iterations + 1, eval_interval)
plt.plot(iterations, returns)
plt.ylabel('Average Return')
plt.xlabel('Iterations')
plt.ylim(top=250)
(0.08000040054321289, 250.0)
影片
圖表很棒。但更令人興奮的是看到代理程式實際在環境中執行任務。
首先,建立一個在筆記本中嵌入影片的函式。
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
現在透過代理程式反覆執行 Cartpole 遊戲的幾個回合。基礎 Python 環境 (TensorFlow 環境包裝函式「內」的環境) 提供 render() 方法,該方法會輸出環境狀態的影像。這些可以收集到影片中。
def create_policy_eval_video(policy, filename, num_episodes=5, fps=30):
filename = filename + ".mp4"
with imageio.get_writer(filename, fps=fps) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_py_env.render())
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_py_env.render())
return embed_mp4(filename)
create_policy_eval_video(agent.policy, "trained-agent")
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x555a5d3cf880] Warning: data is not aligned! This can lead to a speed loss
為了好玩,請將經過訓練的代理程式 (上方) 與隨機移動的代理程式進行比較。(它表現不太好。)
create_policy_eval_video(random_policy, "random-agent")
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x55f466934880] Warning: data is not aligned! This can lead to a speed loss